
Disaster-response robots competition – DARPA Robotics Challenge Trials 2013

Image credit: YT screenshot courtesy LockheedMartin videos
The DARPA Robotics Challenge (DRC) is extremely difficult competition of robot systems and software teams vying to develop robots capable of assisting humans in responding to natural and man-made disasters. Seventeen teams from around the world will be participating in the DRC Trials on December 20 – 21, 2013 at the Homestead-Miami Speedway, USA.
The teams participating in the challenge represent some of the most advanced robotics research and development organizations in the world which are collaborating and innovating on a very short timeline to develop the hardware, software, sensors, and human-machine control interfaces that will enable their robots to complete a series of challenge tasks selected by their relevance to disaster response.
All teams will attempt to guide their robots through eight individual, physical tasks that test mobility, manipulation, dexterity, perception, and operator control mechanisms. Up to eight teams will then move forward with DARPA funding to compete in the DRC Finals, where other teams will also be welcome to compete using independent sources of funding. The Finals will occur December 20 – 21, 2014 and will require robots to attempt a circuit of consecutive physical tasks, with degraded communications between the robots and their operators. The winning team will receive a $2 million prize.
Why Robotics Challenge?
During the Fukushima nuclear meltdown, which drove creation of the DRC, the simple act of turning a valve and venting hydrogen in the reactor buildings might have prevented catastrophe. However, that single capability is not enough for an effective disaster response robot. The DRC Trials tasks require robots to demonstrate that they can move from a sanctuary area to a danger zone and then work effectively once there. All eight of the tasks to be tested are deemed equally necessary.
DARPA expects that the technologies resulting from the competition will transform the field of robotics and catapult forward development of robots featuring task-level autonomy that can operate in the hazardous, degraded conditions common in disaster zones.
DRC competition was announced in April 2012 when DARPA released a solicitation for systems and software teams to submit proposals. At the same time, DARPA announced its intent to issue a contract to Boston Dynamics (recently acquired by Google) to begin development of the Atlas robot, a hydraulically powered robot in the form of an adult human.
Because disasters are so unpredictable in their manifestation and effects, the type of robots DARPA envisions to aid in these situations must be adaptable and require four key capabilities to be effective:
- Mobility and dexterity to maneuver in the degraded environments typical of disaster zones;
- Ability to manipulate and use a diverse assortment of tools designed for humans;
- Ability to be operated by humans who have had little to no robotics training;
- Partial autonomy in task-level decision-making based on operator commands and sensor inputs
The DRC Trials will test all of these capabilities, but primarily mobility, manipulation, and dexterity. The DRC Finals will be a more robust and demanding test of all four capabilities.
Trials will give DARPA a baseline on the current state of robotics and determine which teams will continue to receive DARPA funding to expand on their potential. Imposing and unusual as the robots competing in the trials might seem, they will move slowly through the tasks.
Like a one-year-old child beginning to walk and interact with the world, there will be stumbles and falls.
When the DARPA Grand Challenges first tested driverless vehicle technology, the competitors got off to a shaky start, but there was extraordinary improvement in the year between the two challenges.
Similarly, the DRC Trials are expected to mark the beginning of an historic transformation in robotics.
By the time of the DRC Finals, it is expected that the robots will demonstrate roughly the competence of a two-year-old child, giving them the ability to autonomously carry out simple commands such as “Clear the debris in front of you” or “Close the valve.”
The robots will still need to be told by human operators which tasks to chain together to achieve larger goals, but DARPA’s hope is that this demonstration will show the promise disaster response robots hold for mitigating the effects of future disasters.
Video courtesy Lockheed Martin
Anatomy of a disaster-response robot
While a number of the teams’ robot designs embody different approaches, the designs also incorporate many of the same advanced technologies. Technologies include those that help the robots perceive, move through and perform tasks in simulated disaster environments, all with a human operator in the loop.
The technologies also enable the robots’ operators to see what the robots see and direct the robots in real time.
The Atlas robot pictured below is an example of one of many innovative prototypes of disaster-response robots:
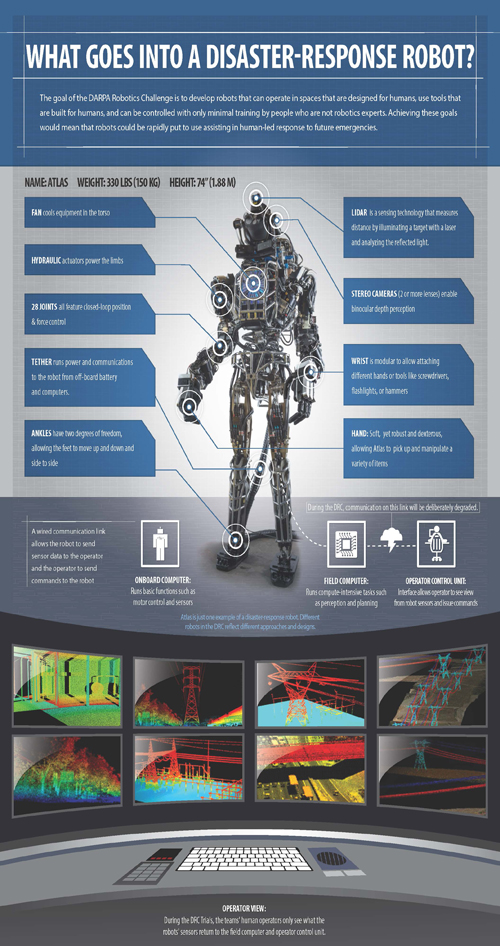
Image courtesy: DARPA DRC
A look at the competition course and teams
The teams competing will direct their prototype robots to accomplish eight tasks, each designed to test the robots’ ability to perform a number of critical real-world disaster-response skills.
Through the tasks, DARPA seeks to determine the robots’ ability to act semi-autonomously, instead of through tele-operation, by deliberately varying communications speeds between the robots and their operators.
The tasks are designed to simulate what a future robot might have to do to safely enter and effectively work inside a disaster zone. They will test the robots’ autonomous perception, autonomous decision-making, mounted and dismounted mobility, dexterity and strength.
Each team will receive a score based on its performance, with all eight tasks carrying equal weight. Up to eight teams with the highest scores may continue to receive DARPA funding to prepare for the DRC Finals scheduled for late 2014.

Click to see hi-res image. Image courtesy: DARPA DRC
Each task presents distinct challenges for the robots and their operators:
Drive and Exit Utility Vehicle: The hardest single task and the one that requires the most robot-human interaction. The operators must direct the robots to drive the vehicle safely despite occasional communications disruptions. Getting out of the driver’s seat poses significant strength and dexterity challenges for the robots.
Walk Across Rough Terrain: The robots must maintain their balance and identify safe routes for placement of limbs.
Remove Debris from Doorway: Robots must demonstrate a wide range of motion, in addition to balance and strength, to clear a path forward.
Open Series of Doors: Moving the doors in an arc challenges the robots’ perception and dexterity. The robots must figure out how to align and move themselves as they open each door.
Climb Industrial Ladder: To avoid falls, the robots must safely navigate the ladder and maintain their balance as they climb. Strength is required to stop a fall.
Cut Through Wall: Using power tools tests the robots’ strength, dexterity and ability to perceive their environment. The robots must also simultaneously apply rigid force to hold a tool, yet demonstrate the flexibility to smoothly manipulate it.
Carry and Connect Fire Hose: The robots must identify the standpipe and then transport a bulky, non-rigid item (the fire hose) to it. The robots must then have sufficient dexterity and strength to attach the hose to a standpipe and open the spigot.
Locate and Close Leaking Valves: The robots must identify the valves, determine which ones are open and have sufficient range of motion to turn the valve wheels in an arc to close them.
Because the robots are still so early in their development, robots are provided with 30 minutes to perform each task. Each team will attempt to complete each task once over the course of the two-day event. It is expected, however, that not all of the teams will finish every task.
“We know the robots are slow and unsteady at this point—they’re much like a one-year-old human in terms of locomotion and grasping abilities and much farther behind that in brainpower,” said Gill Pratt, DARPA program manager.
“The robots are taking ‘baby steps’ this year, but their performance will establish a reference point for what we can expect from the teams that return next year for the DRC Finals.
We want that event to be much more difficult and force the robots to demonstrate useful capabilities in realistic disaster scenarios.”
Video courtesy DARPA
The teams are divided into four tracks: A, B/C, and D. There are 17 teams/robots in DRC Trial.
The six Track A robots (funded by DARPA) will compete against seven teams from Track B/C (which will be using the Atlas robot created by Boston Dynamics for DARPA), and against 4 teams from Track D (non-funded option for teams developing their own hardware and software. Track D is for teams that have the software skills as well as expertise with complex systems and have a platform that will be hydraulic, electric, pneumatic or a hybrid).
Check all the teams and robots here.
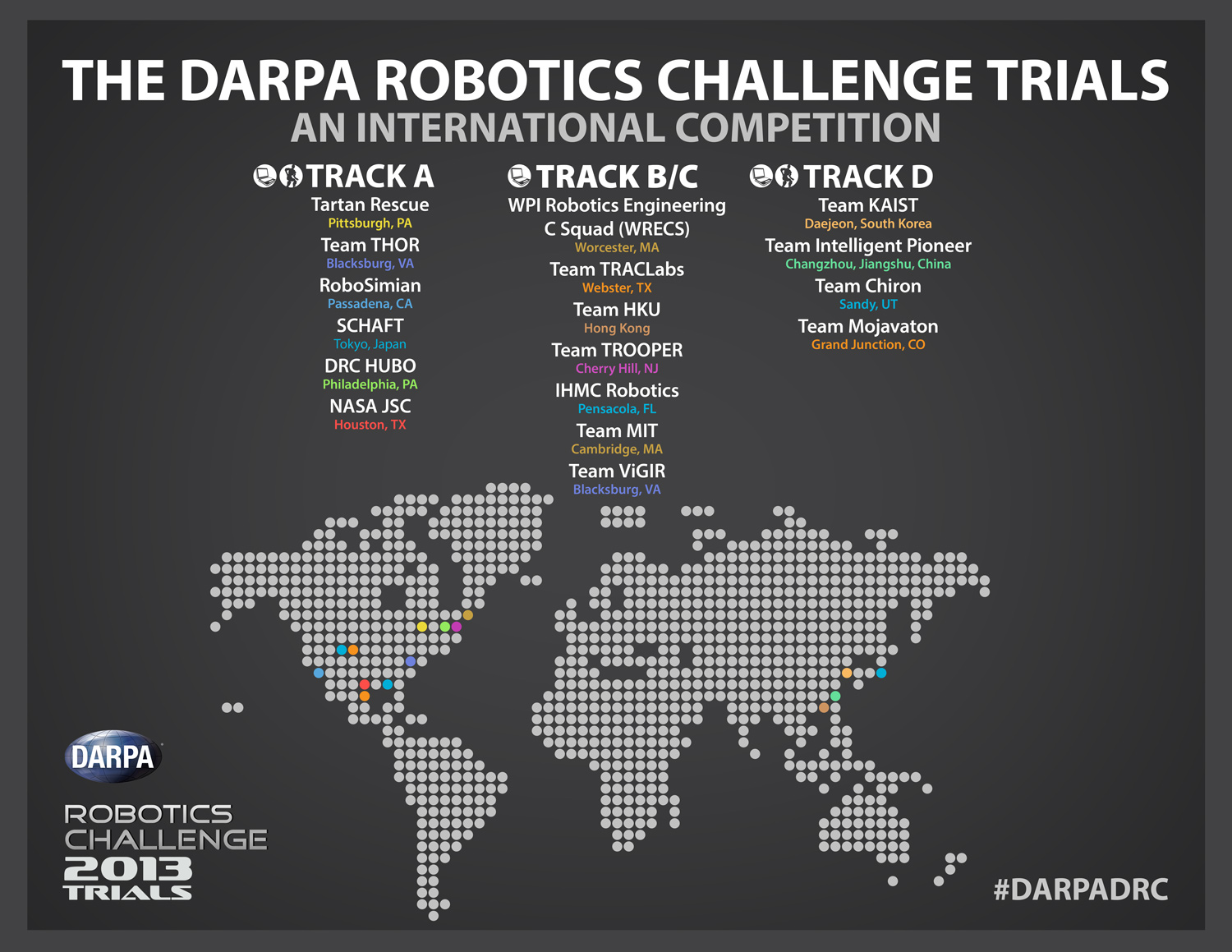
Image courtesy DARPA
Track A – DARPA funded teams and robots
In June 2013, six teams were selected to receive continued funding and continue to the 2013 Trials. Those 6 teams are:
DRC-Hubo
Philadelphia, PA
Drexel University’s design focuses on a mature, open-architecture, bipedal robot called Hubo. Each member on Drexel’s team will be equipped with a stock Hubo, a complete, full-sized humanoid. This infrastructure will catalyze a multi-university effort to “hit the ground running” and successfully address all anticipated DRC events in a “program-test-perfect” model.
NASA JSC Team Valkyrie
Houston, TX
NASA Johnson Space Center is developing a next-generation humanoid robot and control paradigm capable of performing dynamic, dexterous and perception-intensive tasks in a variety of scenarios. NASA JSC’s development approach will apply successful practices that have been used to develop multiple generations of Robonaut and related technologies in collaboration with academic, commercial and other government partners.
The NASA team is comprised of robotics engineers with a 20 year lineage of developing humanoid, spider-like, inspection and roving robots. Many of the DRC NASA team members played key roles in the prior development of Robonaut, the first humanoid to be flown to the International Space Station. From that heritage, NASA’s robot for the DARPA Robotic Challenge extends that legacy by deploying a more advanced, bi-pedal, full body design that can intervene in terrestrial disaster scenarios, but also walk on Mars. The descendants of the NASA DRC entry will undoubtedly play a key role in the future of planetary exploration and many of these team members will make sure that happens.
RoboSimian
Pasadena, CA
http://www-robotics.jpl.nasa.gov/tasks/showTask.cfm?TaskID=236&tdaID=700043
NASA Jet Propulsion Labs is building RoboSimian, a simian-inspired, limbed robot that will use deliberate and stable operations to complete challenging tasks under supervised teleoperation. The team will employ design methods, system elements and software algorithms that have already been successfully demonstrated in JPL’s existing robots. RoboSimian will use its four general-purpose limbs and hands, capable of both mobility and manipulation, to achieve passively stable stances, create multi-point anchored connections to supports such as ladders, railings and stair treads, and brace itself during forceful manipulation operations.
SCHAFT
Japan
SCHAFT Inc. is building a bipedal robot based on mature hardware and software designed for its existing HRP-2 robot. SCHAFT will create an Intelligent Robot Kernel in which it will combine the necessary software modules for recognition, planning, motion generation, motion control and a user interface. The group will divide into three teams to execute the tasks: hardware design, software integration and scenario testing.
Tartan Rescue
Pittsburgh, PA
Carnegie Mellon University-NREC is developing the CHIMP (CMU Highly Intelligent Mobile Platform) robot for executing complex tasks in dangerous, degraded, human-engineered environments. CHIMP will have near-human form factor, work-envelope, strength and dexterity to work effectively in such environments, yet avoid the need for complex control by maintaining static rather than dynamic stability.
We faced the difficult challenge of designing and building the robot at the same time that we developed the software. Without a complete robot, we developed and tested much of the software using a simulator and a surrogate robot arm. We used the results of the simulation tests to put finishing touches on the hardware design as the robot came together.
Team THOR
Blacksburg, VA Philadelphia, PA Melbourne, FL Seoul, Korea
Virginia Tech is developing THOR, a Tactical Hazardous Operations Robot, which will be state-of-the-art, light, agile and resilient with perception, planning and human interface technology that infers a human operator’s intent, allowing seamless, intuitive control across the autonomy spectrum. The team will emphasize three essential themes in developing THOR: hardware resilience, robust autonomy and intuitive operation.
During the Trials event, DARPA will host an Expo of relevant technologies in both emergency response and advanced robotics platforms. The expo area is open to the public (for free) during the hours of 9:30 am to 4:30 pm on December 20-21, 2013. The goal of the Expo is to share technologies amongst the emergency responder community, technology developers and the public. The Expo will also take place outside, and will consist of a number of static display areas as well as a large dynamic location for scheduled technology demonstrations.
I'm a dedicated researcher, journalist, and editor at The Watchers. With over 20 years of experience in the media industry, I specialize in hard science news, focusing on extreme weather, seismic and volcanic activity, space weather, and astronomy, including near-Earth objects and planetary defense strategies. You can reach me at teo /at/ watchers.news.
Commenting rules and guidelines
We value the thoughts and opinions of our readers and welcome healthy discussions on our website. In order to maintain a respectful and positive community, we ask that all commenters follow these rules.